Control multiple servomotors
with TouchDesigner and Arduino
a simple setup using serial communication
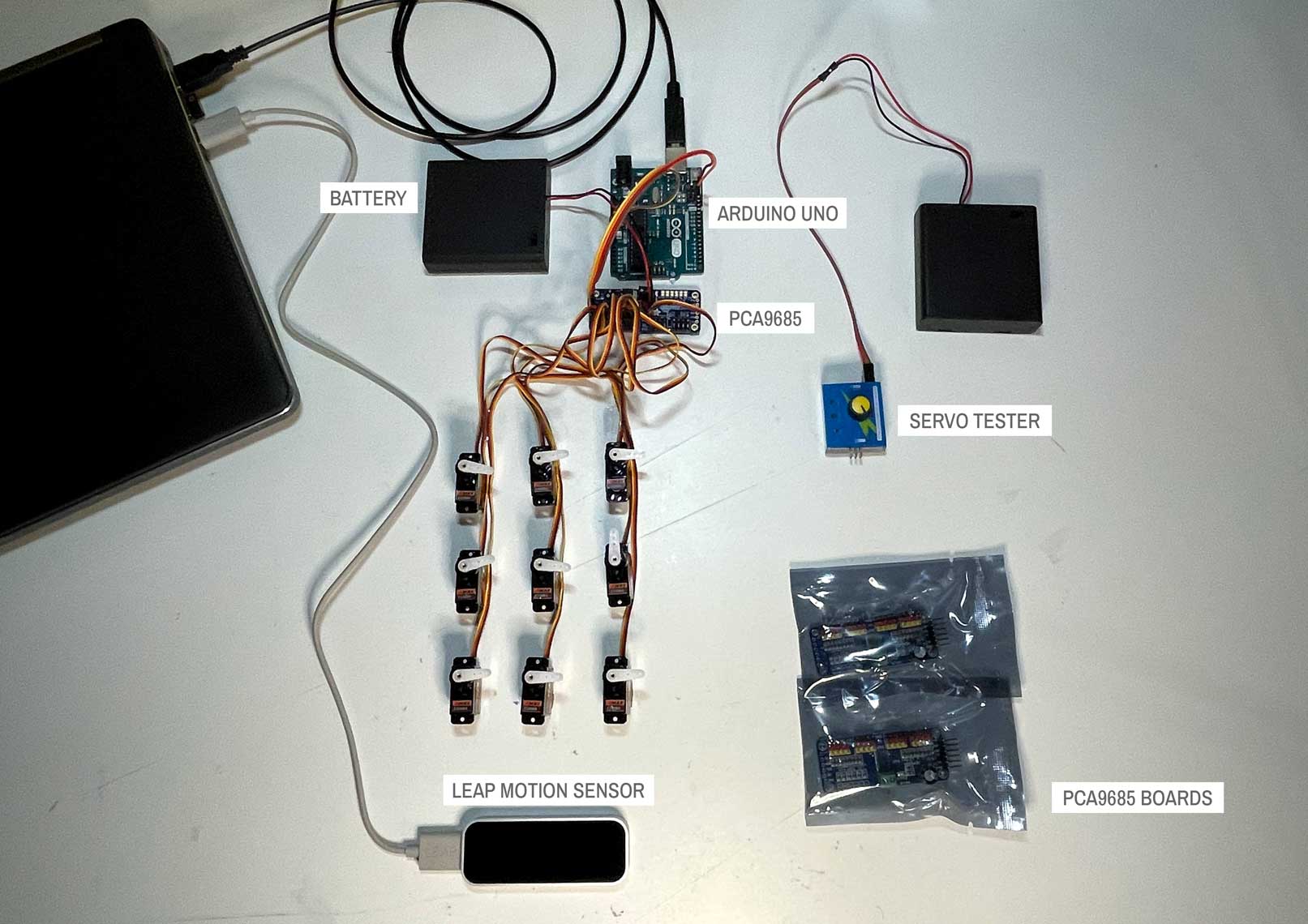
hardware and software:
- Arduino
- PCA9685 breakout board (up to 62 PCA9685 boards can be chained together to control up to 992 outputs)
- Servomotors
- Leap Motion (any sensor or input will work)
- TouchDesigner
Arduino
Include the Wire library and the library for the PCA9685 board. Define the pulse width and frequency for your motors. Using the pwm.setPWM(), create a function to send a position to all of your motors.
Copy and paste the code from the TouchDesigner User Guide Arduino page from under the subheading ‘Receiving Data on the Arduino’. Edit the ‘if’ statement to create a variable for the servo position to receive from TouchDesigner.
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
#define MIN_PULSE_WIDTH 650
#define MAX_PULSE_WIDTH 2500
#define FREQUENCY 50
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
//setup serial buffer
char buffer[16]; //maximum expected length
int len = 0;
void setup()
{
Serial.begin(9600);
Serial.println("Listening, Baud:9600");
pwm.begin();
pwm.setPWMFreq(FREQUENCY);
}
void moveMotor(int servo, float position)
{
int pulse_width;
pulse_width = int(position / 1000000 * FREQUENCY * 4096);
pwm.setPWM(servo, 0, pulse_width);
}
void moveAll(float position)
{
moveMotor(0, position);
moveMotor(1, position);
moveMotor(2, position);
moveMotor(3, position);
moveMotor(4, position);
moveMotor(5, position);
moveMotor(6, position);
moveMotor(7, position);
moveMotor(8, position);
}
void loop()
{
if (Serial.available() > 0)
{
int incomingByte = Serial.read();
buffer[len++] = incomingByte;
if (len >= 16)
{
len = 0;
}
if (incomingByte == '\n')
{
int position;
int n = sscanf(buffer, "%d", &position);
if (n == 1)
{
Serial.println(position);
moveAll(position);
}
else
{
Serial.println("failure");
}
len = 0;
}
}
}
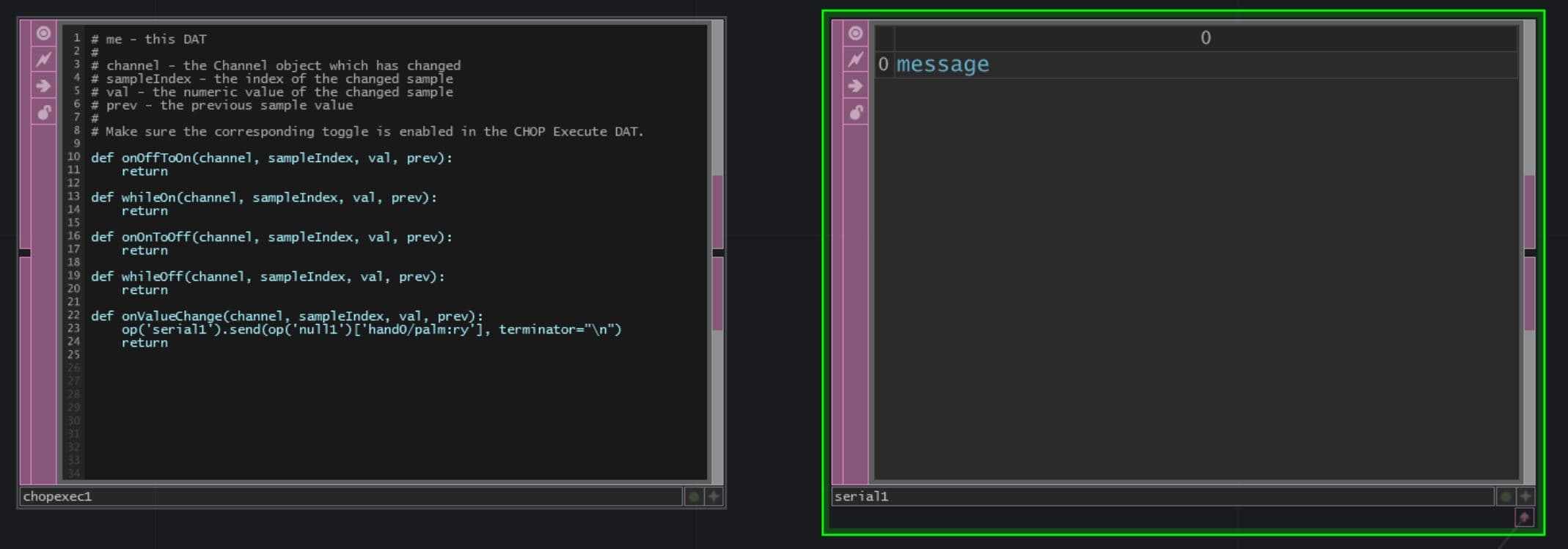
Touchdesigner
Use a CHOP Execute DAT to send information through the SerialDAT to the Arduino. Make sure that the values you send to the Arduino fall between the minimum and maximum pulse width of your servomotors.